| 閉じる |
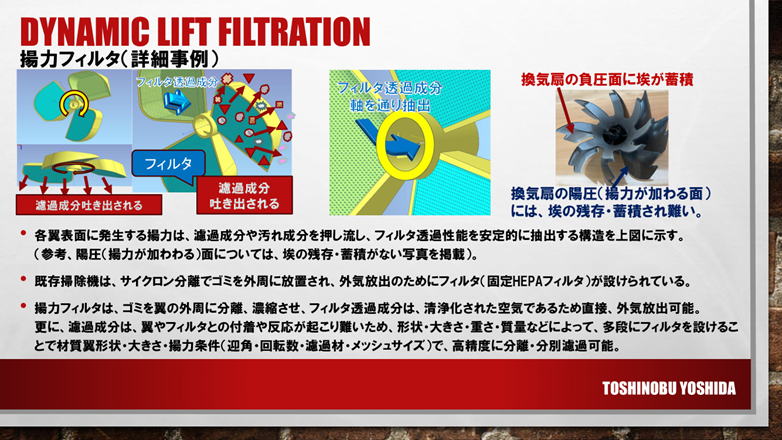
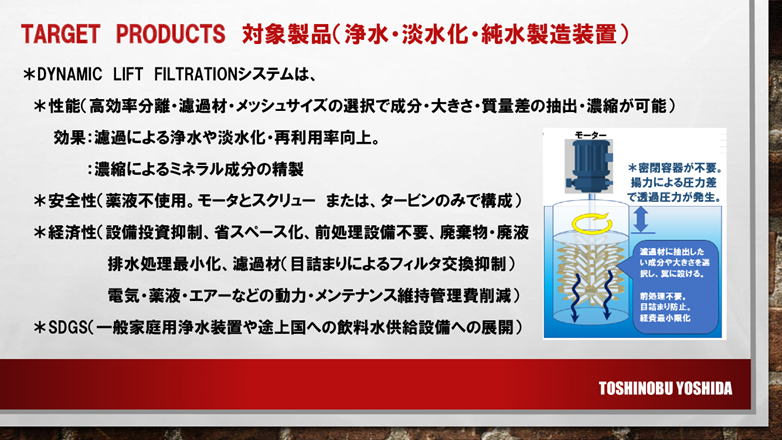
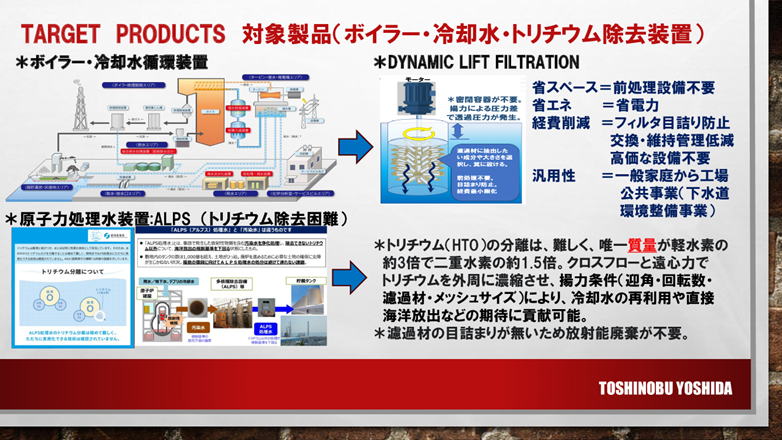
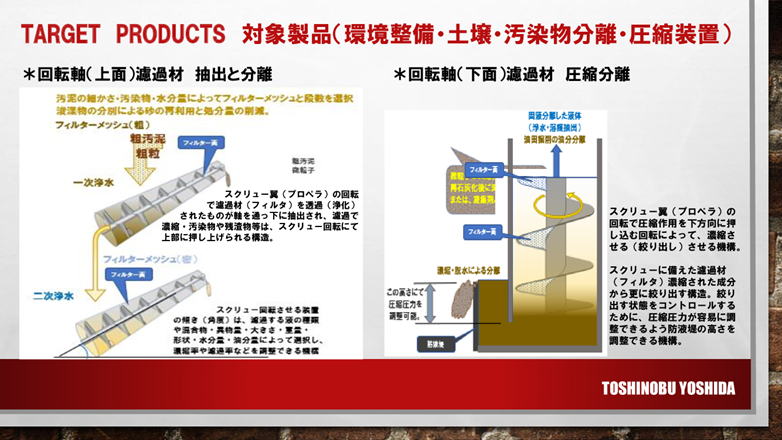
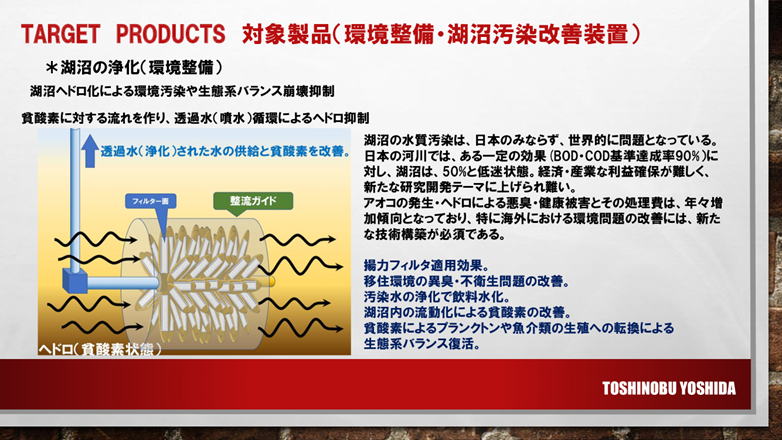
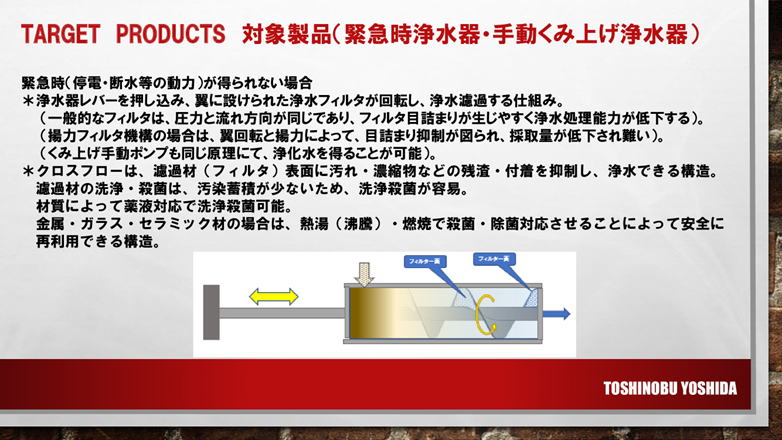
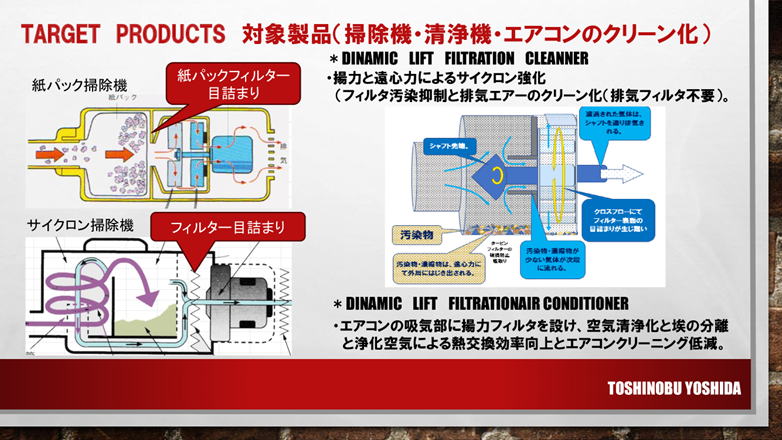
| 【発明の名称】フィルタ装置 【国際特許分類】 B01D 33/15 (2006.01) B01D 46/10 (2006.01) 【FI】 B01D 33/22 B01D 46/10 D 【特許権者】 【識別番号】523026178 【氏名又は名称】吉田 利信 【住所又は居所】千葉県印西市牧の原5丁目10番地1 【代理人】 【識別番号】100185270 【弁理士】 【氏名又は名称】原田 貴史 【代理人】 【識別番号】100225347 【弁理士】 【氏名又は名称】鬼澤 正徳 【発明者】 【氏名】吉田 利信 【住所又は居所】千葉県印西市牧の原5丁目10番地1 【要約】 (修正有) 【課題】フィルタ回転だけでは、ろ過材を透過させるエネルギーが生じず、フィルタ回転による異物除去が困難であり、邪魔板による乱流作用で異物を除去。邪魔板フィルタの隙間調整が必要となり、構造上精密組み立てが必要である。 【解決手段】スクリューの羽根車の圧力を生み出す表面にフィルタを設け、回転で生じた圧力がフィルタを透過させるエネルギーを生み出し、フィルタ表面を透過する方向に対し、分離された異物は、フィルタ回転や仰角に平行な流れ(クロスフロー)で押し出され、フィルタ表面に異物が保持されることが困難な構造。また、回転数・仰角によって、フィルタ透過圧力を高めると同時に異物保持力が低下の両立ができる。外部圧力供給となるポンプや邪魔板は、不要。組み立て精度も不要。スクリューの回転においては、キャビテーションによる振動現象の発生を利用し、キャビテーションによって、フィルタ表面を振動させ付着した異物を除去することが可能である。 【選択図】図1  【特許請求の範囲】 【請求項1】 流動性を有する対象物体が存在する雰囲気に配置され、かつ、回転部材が第1回転方向に回転されて前記対象物体に含まれる物体と流体とを分離するフィルタ装置であって、 前記回転部材に設けられ、かつ、前記回転部材の半径方向に延ばされた羽根と、 前記羽根に設けられた第1通路と、 前記羽根の片側表面が開口され、かつ、前記第1通路に接続された開口部と、 前記羽根の表面に取り付けられて前記開口部を覆い、前記回転部材が回転されると前記物体と前記流体とを分離するフィルタと、 前記回転部材に設けられ、かつ、前記第1通路に接続された第2通路と、 を有し、 前記羽根の厚さ方向の中心を示す第1仮想線と、前記回転部材が前記第1回転方向に回転した場合における前記対象物体の流動方向を示す第2仮想線との間に、所定の迎角が設定され、 前記迎角は、 0度<迎角<45度 の範囲内である、フィルタ装置。 【請求項2】 請求項1記載のフィルタ装置において、 前記回転部材を回転させる電動モータが、更に設けられている、フィルタ装置。 【請求項3】 請求項1記載のフィルタ装置において、 前記フィルタが取り付けられている前記羽根の表面は、前記回転部材が前記第1回転方向に回転されて前記対象物体が流動すると揚力でフィルタ透過圧力を作る、フィルタ装置。 【請求項4】 請求項1記載のフィルタ装置において、 前記第2通路に接続された渦巻きポンプを有し、 前記対象物体に含まれている流体が前記フィルタを透過し、吸引され、かつ、前期第2通路に設けたスクリューと一体型とする、フィルタ装置。 【請求項5】 請求項1記載のフィルタ装置において、 前記フィルタは、前記羽根の表面に対して取り付け及び取り外しが可能である、フィルタ装置。 【請求項6】 請求項3記載のフィルタ装置において、 前記迎角を調整する調整機構が設けられている、フィルタ装置。 【請求項7】 請求項1記載のフィルタ装置において、 前記回転部材は、前記第1回転方向とは逆の第2回転方向に回転可能である、フィルタ装置。 【請求項8】 請求項1記載のフィルタ装置において、 前記羽根は、前記回転部材の外周面に螺旋状に、かつ、前記回転部材の回転中心である中心線に沿った方向で所定範囲に亘って設けられている、フィルタ装置。 【請求項9】 請求項1記載のフィルタ装置において、 前記回転部材の回転中心である中心線は、鉛直方向に沿って配置され、 前記羽根は、前記回転部材の外周面に、前記回転部材の回転方向に沿って複数設けられており、 前記回転部材及び前記複数の羽根を収容し、かつ、前記対象物体が供給される筒形状の容器と、 前記鉛直方向で前記容器の上端に設けられ、かつ、前記容器の内径未満の内径を有する供給管と、 前記鉛直方向で前記容器の下端に設けられ、かつ、前記容器の内径未満の内径を有する吐出管と、 を有し、 前記複数の羽根は、前記回転部材が前記第1回転方向に回転されると、前記容器内おける前記対象物体の流れが前記鉛直方向で下に向くように、前記第1回転方向に対して傾斜されている、フィルタ装置。 【請求項10】 請求項1記載のフィルタ装置において、 前記回転部材の回転中心である中心線は、鉛直方向に沿って配置され、 前記羽根は、前記回転部材の外周面に、前記回転部材の回転方向に沿って複数設けられており、 前記回転部材及び前記複数の羽根を収容し、かつ、前記雰囲気中に前記中心線を中心として配置される筒形状の内側容器と、 前記雰囲気中から前記雰囲気外に亘って配置され、かつ、前記中心線を中心として前記内側容器の外側に配置される筒形状の外側容器と、 を有し、 前記複数の羽根は、前記回転部材が前記第1回転方向に回転されると、前記内側容器内における前記対象物体の流れが前記鉛直方向で下に向くように、前記第1回転方向に対して傾斜されている、フィルタ装置。 【発明の詳細な説明】 【技術分野】 【0001】 本開示は、回転部材にフィルタを設けたフィルタ装置に関する。 【背景技術】 【0002】 回転部材にフィルタを設けたフィルタ装置の一例が、特許文献1に記載されている。特許文献1に記載されたフィルタ装置は、フィルタ容器内を圧入し、ろ過する装置で、複数の邪魔板による旋渦流に突流を生じさせ、フィルタ表面に付着した異物を除去するとともにフィルタ回転による遠心力にてフィルタ内部が陽圧となり、フィルタ表面に付着した異物を逆洗し除去できる装置である。特許文献1に記載されている装置は、第1フィルタ容器と、第1のフィルタ容器内に収容され、かつ、電動モータの回転軸に取り付けられた円筒円板状の全面フィルタ(フィルタエレメント)と、円板状のフィルタが積み重なった隙間に移動可能な邪魔板を有する。邪魔板は、フィルタ上端位置から下端位置に亘って延在されている。邪魔板は、空間の作動流体の中をフィルタの円周方向に移動し干渉しない位置に設けたものである。邪魔板は、複数を有する。 【0003】 特許文献1に記載されたフィルタ装置においては、邪魔板を設けたことにより、フィルタ容器内周面の近傍において、隣接する邪魔板間の領域で、渦が発生し易くなる。係る渦により、邪魔板の進行方向後方(作動流体の流れの上流側)における乱流や渦 が発生し易くなり、フィルタエレメントの半径方向外方表面に付着した異物を半径方向外方に移動しようとする力も大きくなる、と記載されている。さらに、邪魔板は、フィルタエレメントの半径方向外方表面の直近を通過する。そのため、渦による旋渦流や突流が生じ、フィルタエレメントの半径方向外方表面に付着した異物を剥離する作用を奏する、と記載されている。 【先行技術文献】 【特許文献】 【0004】 【特許文献1】 特許第5757997号公報 【発明の概要】 【発明が解決しようとする課題】 【0005】 本願発明者は、特許文献1に記載されているフィルタ装置は、 a)単体、または、複数のフィルタを用いフィルタ回転だけでは、ろ過することができず、かつ、流体がフィルタと同期し、フィルタ回転による効果が得られ難く、固定されたフィルタと同様となることから、フィルタ表面の汚染を除去することはできず、邪魔板による乱流作用を用い、少しでもフィルタ表面に対する圧力方向を変化させる方法としている。 b)ろ過するためには、外部からの圧力供給となるポンプが必須となる構成である。 c)邪魔板によって、フィルタ回転を阻害し、回転による効果を減少させている。 d)乱流を生じさせるためには、邪魔板フィルタの隙間を小さくすることが必要なため、構造上精密組み立てが必要となる。 e)乱流が生じることによって、異物もフィルタ表面に再付着する確率が高まる。(異物の排出や分離が困難となり、目詰まり防止効果が低い)。 f)フィルタ装置構成として、(1)ろ過するためのフィルタ(全面ろ過)、(2)フィルタ 圧力容器(フィルタハウジング)、(3)ろ過材を透過させる圧力を生み出すポンプ、(4)ろ過した流体を外部に送る軸、(5)フィルタを回転さするモータ、(6)邪魔板が最小限必要となり、乱流を生み出すために組み立て制度が必要な装置構造である。 という課題を認識した。 【0006】 本開示の目的は、対象物体に含まれる物体と流体とを分離し、かつ、フィルタ目詰まりを抑制でき、かつ、構造が複雑化することを抑制可能なフィルタ装置を提供することにある。 【課題を解決するための手段】 【0007】 本開示は、流動性を有する対象物体が存在する雰囲気に配置され、かつ、回転部材が第1回転方向に回転されることで、フィルタに圧力が加わる仰角を設けた構造であり、前記対象物体に含まれる物体と流体とを分離するフィルタ装置であって、かつ、前記回転部材の半径方向に延ばされた羽根と、前記羽根に設けられた第1通路と、前記羽根の 表面に開口され、かつ、前記第1通路に接続された開口部と、前記羽根の表面に取り付けられて前記開口部を覆い、前記回転部材が 回転されると前記物体と前記流体とを分離するフィルタと、前記回転部材に設けられ、かつ、前記第1通路に接続された第2通路とを有する、フィルタ装置である。 a)−1 ポンプやスクリュー・タービンなどの羽根車の圧力を生み出す表面にフィルタを設けることによって、回転で生じた圧力がフィルタを透過するエネルギーを生み出す。 a)−2 羽根に取り付けられたフィルタ表面を透過する方向に対し、分離された異物は、フィルタ回転や仰角に平行な流れ(クロスフロー)で押し出され、フィルタ表面に 異物が保持されることが困難となる。(回転数・仰角によって、フィルタ透過圧力 を高め異物保持力を低下させる効果が得られる)。 a)−3 羽根車やフィルタの回転数や仰角は、汚染や粘土状態で設定が可能。 b)−1 外部圧力供給となるポンプや邪魔板は、不要となり、組み立て精度も不要となる。 b)−2 ろ過された流体をより効果的に排出する場合には、電動モータに付属した渦巻きポンプを取り付け、回転軸受け内部に設けられたスクリューにて圧送も可能である。 c)−1 羽根やフィルタの回転数(速度)を速めることによって、フィルタ透過圧力を高め透過効率を向上させ、かつ、フィルタ表面に異物保持力が低下し、フィルタ表面の異物付着を抑制させることが両立できる。 c)−2 羽根やフィルタの仰角については、電動モータの性能・能力・負荷や対象物体の汚染度・粘性に合わせて調整できる。 d)−1 対象物体は、フィルタの回転によってフィルタ表面にクロスフローが生じることによって異物の蓄積を抑制することができる。 d)−2 フィルタ容器(フィルタハウジング)は完全に密閉、または、加圧容器とする必要性は無い。ただし、ポンプのケーシングを容器とし、かつ、羽根車の表面にフィルタが 取り付けられるポンプ一体型の構造では、加圧容器(ケーシング)が必要となる。 e)−1 異物は、クロスフローによって押し出されたるため、再汚染を抑制する。 e)−2 スクリューの回転においては、キャビテーションによる振動現象の発生を利用し、キャビテーションが生じる回転数で制御することによって、フィルタ表面を振動させに付着した異物を除去することが可能である。 f)−1 フィルタ装置構成として、 (1)ろ過するためのフィルタ(片面ろ過:回転により圧力が加わる面のみ)、 (2)フィルタ容器、かつ、ポンプ一体型ケーシングの場合は、加圧容器。 (3)ろ過した流体を外部に送る軸、 (4)フィルタを回転させるモータ、 回転フィルタと容器とのスペースに影響されないことから構造上、単純となる。 【発明の効果】 【0008】 本開示のフィルタ装置によれば、対象物体に含まれる物体と流体とを分離でき、流体は、フィルタを通過する。また、回転部材が第1方向に回転することでフィルタ面に物体は残存しにくい(クロスフロー)。したがって、フィルタが目詰まりすることを抑制するため、格別の要素を設けずに済み、構造が複雑化することを抑制できる。また、クロスフローは、逆浸透膜などに使用される方法で膜の隙間を透過させるために前処理 ろ過装置や高圧ポンプも低減できる。 【図面の簡単な説明】 【0009】 【図1】本開示におけるフィルタ装置の一例を示す模式的な断面図である。 【図2A】フィルタ装置が有するプロペラの斜視図である。 【図2B】プロペラの部分的な平面断面図である。 【図3A】プロペラの仮想線を鉛直方向に配置した例を示す模式図である。 【図3B】プロペラの仮想線を鉛直方向に配置し液面による圧力差によって透過圧力を生じさせる模式図である。 【図4】図1に示すフィルタ装置にポンプの羽根車を延長し配管の内部に吸引力を高めた模式的な断面図である。 【図5A】フィルタ装置を渦巻ポンプに適用した例を示す模式的な断面図である。 【図5B】図5Aの渦巻ポンプをV−V線に沿って破断した側面断面図である。 【図6】図5Bの要部を示す拡大断面図である。 【図7A】フィルタ装置をタービンに適用した例を示す模式図である。 【図7B】図7AのタービンをVI−VI線に沿って破断した断面図である。 【図8】図7Bの一部を示す拡大断面図である。 【図9】図7B及び図8に示すタービンの羽根の向きを変えた例を示す拡大断面図である。 【図10】フィルタ装置をスクリューに適用した例を示す断面図である。 【図11】図10のフィルタ装置の部分的な拡大断面図である。 【発明を実施するための形態】 【0010】 (概要) 本開示のフィルタ装置の適用対象である対象物体は、流動性を有し、かつ、物体及び流体を含む。フィルタ装置のフィルタは、物体と流体とを分離する。本開示では、対象物体と、フィルタにより分離される物体とを区別して記載する。本開示のフィルタ装置は、濾過システム、浄化システム、蒸留システム、分離システム、濃縮システム、抽出システム 、脱水システム、海水の淡水化システム、等に用いることができる。以下、フィルタ装置に含まれるいくつかの実施形態を図面に基づいて説明する。フィルタ装置の実施形態を説明するための図において、同一部には原則として同一の符号を付し、そ の繰り返しの説明は省略する。 【0011】 (具体例1) 図1に示すフィルタ装置10は、仰角が設けられた羽根22、または、プロペラ14と31フィルタが電動モータ12によって回転する渦巻ポンプ12と、回転部材13を有する。渦巻ポンプ12は、電動モータ11、羽根車17及び吸い込み口18及び吐出 口19を有する。電動モータ11は、吐出管16の外部に設けられている。電動モータ11は、電力が供給されて回転する原動機であり、電動モータ11の回転軸15は、正回転及び逆回転が可能である。また、電動モータ11に供給される電流値が制御されて、回転軸15の回転速度が制御される。羽根車17及び吸い込み口18及び吐出口1 9は、吐出管16の内部に設けられている。吐出管16は、吐出通路20を有し、吐出通路20は、吐出口19に接続されている。 【0012】 羽根車17が電動モータ11の回転力で回転されると、吸い込み口18から流体が吸い込まれ、かつ、吐出口19から吐出通路20へ流体が吐出される。回転部材13は、羽根車17に接続されており、回転部材13は、吐出管16の外部に配置されている。回転部材13は、中空の回転軸である。回転部材13の材質は、例えば、金属である。回転軸15、羽根車17及び回転部材13は、何れも中心線A1を中心として回転可能に設けられている。また、回転軸15、羽根車17及び回転部材13は、中心線A1に沿った方向に並べて配置されている。 【0013】 電動モータ11が正回転されると、回転部材13は、第1回転方向C1に 回転されるものとする。回転部材13は、中空であり、回転部材13は、中心線A1に沿った方向の通路21を有する。通路21は、吸い込み口18に接続されている。回転部材13を半径方向に貫通する通路28が設けられている。通路28は、通路21につながっている。通路28は、羽根22の数と同じ4個設けられている。通路28は、回転部材13の回転方向に間隔をおいて設けられている。 【0014】 プロペラ14は、回転部材13に取り付けられている。プロペラ14は、対象物体B1が存在する雰囲気G1に置かれる。対象物体B1は、流体及び物体を含み、かつ、流動性を有する。対象物体B1は、回転部材13及びプロペラ14が回転されて流動する。流体は、気体及び液体を含む。物体は、異物、残渣、塵埃等を含む。プロペラ14 は、複数の羽根22を有する。羽根22は、回転部材13の外周面から、回転部材13の半径方向で外側に向けて突出されている。複数の羽根22は、回転部材13の第1回転方向C1、つまり、円周方向に所定の間隔で配置されている。図2Aに示すプロペ ラ14は、4枚の羽根22を、中心線A1に沿った方向で略同じ位置に配置した例である。 【0015】 図2Bは、中心線A1と平行な平面内におけるプロペラ14の平面断面図である。羽根22は便宜上、1枚のみを示してある。羽根22は、回転部材13の外周面に円周方向の所定の範囲に亘って所定の幅で設けられている。羽根22は、表面23及び裏面24を有し、表面23は、裏面24よりも、回転部材13の先端25に近い位置に配置されている。回転部材13を中心線A1と平行な平面内で見ると、羽根22は中心線A 1に沿った方向で所定の厚さを有し、羽根22の厚さは、第1回転方向C1で一定ではない。このため、表面23及び裏面24は、それぞれ湾曲した形状を有する。羽根22の厚さ方向(幅方向)の中心を示す仮想線D1は、表面23と裏面24との間に位置する。羽根22の厚さ方向は、回転部材13の第1回転方向C1に沿った方向を意味する。仮想線D1は、回転部材13の中心線A1に対して傾斜されている。仮想線D1は、回転部材13の回転方向で羽根22の端部26,27同士を通る直線である。 【0016】 図2Bにおいて、第1回転方向C1に沿った仮想線D2と、仮想線D1との間に所定の角度、例えば、迎角θ1が設定される。迎角θ1は、例えば、 0度<θ1< 45度 の範囲内に設定できる。1個毎の羽根22に関し、回転部材13の第1回転方向C1 で、端部26は端部27より下流に位置する。また、中心線A1に沿った方向において、端部26と仮想線D2との間の距離L1は、端部27と仮想線D2との間の距離L2未満である。 【0017】 全ての羽根22は、通路29を有する。通路29は、羽根22の高さ方向に沿って設けられ、通路29は、通路28につながっている。表面23に開口部30が設けられ、開口部30は、通路29につながっている。表面23には、フィルタ31が設けられ ている。フィルタ31は、開口部30を覆っている。フィルタ31は、対象物体B1に含まれる物体と流体とを分離し、かつ、流体を通過させる機能を有する。 【0018】 フィルタ31として、例えば、セラミックフィルタ、合成樹脂フィルタ、紙フィルタ、 金属フィルタ、ウルパフィルタ、ヘパフィルタ等を単独で用いること、または、これらのフィルタを複数個、複数種類組み合わせて用いること、ができる。また、羽根22の材質は、セラミック、金属、合成樹脂、等を単独で選択すること、または、これらの材質の複数種類を組み合わせて選択することもできる。フィルタ31の材質及び羽根22の材質は、対象物体B1の種類、成分、粘度、温度、羽根22の回転速度、羽根22が受ける圧力、等に応じて選択される。対象物体B1は、薬品、有機溶剤、危険物、廃液、汚染物、排水、海水、湖沼水等の液体、気体等を含む。さらに、羽根22の外面にメッキ処理、コーティング処理、釉薬処理等が施されていてもよい。 【0019】 さらに、羽根22の迎角θ1を調整する調整機構が設けられていてもよい。例えば、回転部材13の外周面に雌ねじ穴が設けられ、羽根22が回転部材13の外周面に対してねじ部材・はめ込み・接着により固定されている。そして、ねじ部材を取り外して 羽根22の迎角θ1を調整した状態で、羽根22を回転部材13に対してねじ部材で固定できる位置に、雌ねじ穴が設けられていればよい。また、迎角θ1を調整する場合、通路21と通路29とが接続された箇所を中心として、羽根22が所定角度の範囲内で回転して停止される。 【0020】 (使用例1) フィルタ装置10の実用例1は、次の通りである。中心線A1は、略水平に配置され、かつ、吐出管16は、回転軸15から真上に向けて突出されている例を説明する。雰囲気G1に円筒形状の整流部材32が設けられる。整流部材32は、例えば、金属製であり、整流部材32は動かないように設けられる。プロペラ14は、整流部材32の内部に配置され、整流部材32及び回転部材13は、中心線A1を中心として同心状に配置される。電動モータ11の回転軸の回転力は、渦巻ポンプ12の羽根車17を経由して回転部材13に伝達され、回転部材13及びプロペラ14が第1回転方向C1で回転される。 【0021】 プロペラ14が第1回転方向C1で回転されると、雰囲気G1に存在する 対象物体B1の一部は、図1のように、整流部材32内に進入し、かつ、羽根44同士の間を通過して整流部材32の外へ出る流れが形成される。回転部材13が第1回転方向C1で回転すると、羽根44に迎角θ1が設定されているため、羽根44は、表面23側に おいて、対象物体B1の流れF1の圧力(陽圧)を受ける。流れF1の圧力は、第1回転方向C1と略平行であり、かつ、第1回転方向C1とは逆向きである。また、各羽根44の裏面24側における対象物体B1の流速は、表面23側における対象物体B1の流速を超える。このため、裏面24側における対象物体B1の流れF2の圧力(陰圧・負圧)は、流れF1の圧力未満である。さらに、羽根22は、流れF1の圧力と、流れF2の圧力との差に応じた揚力F3を受ける。揚力F3は、中心線A1に沿った方向である。 【0022】 対象物体B1が流れF1の圧力でフィルタ31に押し付けられると、フィルタ31は、対象物体B1に含まれる物体と流体とを分離する。このため、対象物体B1に含まれる流体のみが、フィルタ31を透過して通路29へ進入する。そして、渦巻ポンプ12の羽根車17の回転により吸引力が発生しているため、通路29へ進入した流体は、通 路28及び通路21を経由して吸い込み口18へ吸い込まれる。渦巻ポンプ12に吸い込まれた流体は、吐出口19から吐出通路20へ吐出される。このようにして、雰囲気G1に存在する対象物体B1のうち、物体を除去した流体のみを抽出、つまり、分離することができる。また、対象物体B1は、流体が吐出通路20から抽出されたことにより、濃縮されたものとして把握することもできる。 【0023】 一方、雰囲気G1において、フィルタ31の表面付近では、対象物体B1の流れ(クロスフロー)E1が生じる。流れE1の向きは、流れF1の向きに対して交差している。このため、フィルタ31により分離された物体が、流れE1によってフィルタ31 の表面から除去され易くなる。フィルタ31により分離される物体は、異物、濃縮物、残渣、ケーキ状の堆積物を含む。このため、フィルタ31に物体が堆積しにくくなり、フィルタ31の目詰まりを抑制できる。したがって、フィルタ31の長寿命化を図ることができ、かつ、メンテナンスフリーとし、フィルタ31の交換頻度を低減させることができる。また、フィルタ31が目詰まりすることを抑制するために、格別の要素を設けずに済み、フィルタ装置10の構造が複雑化することを抑制できる。 【0024】 さらに、電動モータ11の回転軸15を逆回転させると、プロペラ14が第1回転方向C1とは逆の第2回転方向で回転される。この場合、渦巻ポンプ12は吸引力を生じない。すると、雰囲気G1内における羽根22の表面23側の圧力が陰圧となってキャビテーション、つまり、空洞現象が発生する。このため、フィルタ31の表面に付着 している物体が、フィルタ31の表面から一層除去され易くなる。また、通路29内における流体の圧力により、フィルタ31の表面に付着している物体が押され、物体が、フィルタ31の表面から一層除去され易くなる。 【0025】 例えば、船舶のスクリューは、正回転においても回転数によってキャビテーション(振動)が発生し、船舶のスクリューにダメージを生じさせています。これに対して、フィルタ装置10を船舶のスクリューに利用すると、正回転においても、その環境(雰囲気・液 体・気体・温度・濃度・密度など)の条件によってわざとキャビテーションを発生させ、スクリューのフィルタ部に付着した汚染物を除去することができる。特に、 フィルタ表面に付着した異物は、よりキャビテーション効果を高めるために、フィルタ面を陰圧にさせることで、フィルタ表面の洗浄効果を高めることができる。 【0026】 (使用例2) さらに、プロペラ14の回転中心を示す中心線A1は、略水平方向に沿って配置される他、鉛直方向に沿って配置されてもよいし、水平方向及び鉛直方向に対して傾斜するように配置されていてもよい。鉛直方向は、重力の作用方向を意味する。 【0027】 図3Aは、フィルタ装置10を、廃棄物または汚染物を含む対象流体を処理する濃縮システムに用いる例である。中心線A1は、鉛直方向に沿って配置される。さらに、整流部材32の内部に、電動モータ11、渦巻ポンプ12、プロペラ14が設けられる。鉛直方向において、プロペラ14は、電動モータ11及び渦巻ポンプ12より上に 配置される。整流部材32は、供給管33及び吐出管34を有する。供給管33の内径及び吐出管34の内径は、整流部材32の他の箇所の内径未満である。供給管33の入口は、雰囲気G1の外部に配置される。吐出管34は、雰囲気G1内に配置される。電動モータ11の回転方向、及びプロペラ14の羽根22の傾斜方向は、プロペラ14を回転させた場合に、対象物体B1の流動が、鉛直方向で下向きとなるように設定される。 【0028】 図3Aに示す濃縮システムでは、供給管33から整流部材32内へ対象物体B1が供給される。対象物体B1に含まれる物体と流体とがフィルタ31により分離される。フィルタ31により濾過された流体は、吐出管16により雰囲気G1の外部へ抽出される。分離された物体(濃縮液、異物)B2は、整流部材32の吐出管16から雰囲気G1 へ吐出される。したがって、雰囲気G1における物体の濃度が高まる。プロペラ14の回転により、整流部材32の内部の圧力が上昇し、整流部材32は、高圧容器として機能する。 【0029】 図3Bに示すシステムは、中心線A1を鉛直方向に沿って配置する他の例である。図3Bに示すシステムは、外側容器80及び内側容器81を有する。外側容器80及び内側容器81は、共に円筒形状であり、かつ、動かないように設けられる。外側容器8 0及び内側容器81は、共に金属製である。外側容器80は、雰囲気G1の内部、及び外部に亘って配置される。内側容器81は、外側容器80内に配置される。外側容器80及び内側容器81は、中心線A1を中心として同心状に配置される。中心線A1に沿った方向において、外側容器80の長さは、内側容器81の長さを超えている。鉛直方向において、外側容器80の下端と、内側容器81の下端とが、同じ位置に配置されている。外側容器80の下端、及び内側容器81の下端は、雰囲気G1内に位置する。外側容器80の上端は、雰囲気G1より上に位置する。内側容器81の上端は、雰囲気G1における対象物体B1の液面35より下に位置する。雰囲気G1の対象物体B1の一部は、外側容器80と内側容器81との間を通り、内側容器81の内部に存在する。電動モータ11及び渦巻ポンプ12は、雰囲気G 1の外部に配置されるが、図3Bでは、便宜上、示されていない。 【0030】 回転部材13及びプロペラ14は、内側容器81の内部に配置される。電動モータ11の回転方向、及びプロペラ14の羽根22の傾斜方向は、プロペラ14を回転させた場合に、内側容器81の内部の対象物体B1の流動が、鉛直方向で下向きとなるよう に設定される。内側容器81の内部で下向きに流動した対象物体B1は、内側容器81の下端から雰囲気G1へ排出される。このため、内側容器81の内部に存在する対象物体B1の液面35の高さが、外側容器80の外部に存在する液面36の高さより低くなる。したがって、内側容器81の内部に存在する対象物体B1がフィルタ31へ押し付けられる圧力を生じる。 【0031】 また、鉛直方向において、液面35からプロペラ14の羽根22までの距離L4を変更することで、整流部材32の内部で対象物体B1からフィルタ31へ加わる圧力が変動する。具体的には、距離L4が増加することに伴い、対象物体B1からフィルタ31へ加わる圧力が上昇する。この場合、鉛直方向における整流部材32の全長を変更する。電動モータ11は、雰囲気G1の外部、つまり、空気中に設けられるため、電動モータ11の安全性及び耐久性が向上する。 【0032】 (使用例3) 図4に示すフィルタ装置10は、図1のフィルタ装置10の回転部材13の内部に、スクリュー37設けた例である。スクリュー37は、羽根車17に固定された回転軸38と、回転軸38の外周面に螺旋状に設けられた羽根39と、を有する。スクリュー37は、羽根車17と共に同方向に一体回転する。スクリュー37は、通路21内に設けられている。なお、スクリュー37は、吸い込み口18を塞ぐことが無いように配置されている。図4に示すフィルタ装置10においては、電動モータ11の回転力が羽根車17に伝達されると、スクリュー37は、羽根車17と共に同方向に一体回転する。これにより、羽根22の表面23側の圧力と、通路29の圧力との差が一層増加し、フィルタ31を通過する流体の流量を確保し易くなる。 【0033】 (具体例2) 図5A及び図5Bに示すフィルタ装置10は、図1に示すプロペラ14に代えて、渦巻ポンプ40を設けた例である。図5Aは、渦巻ポンプ40の模式的な断面図、図5Bは、図5Aの渦巻ポンプ40をV−V線に沿って破断した側面断面図である。また、図6は、図5Bの中心線A1に対して垂直な平面内における部分的な拡大断面図である。渦巻ポンプ40は、ケーシング41、円板42、及び複数の羽根43を有する。ケーシング41は固定して設けられる。ケーシング41は、吸い込み口48、収容室49及び吐出口50を有する。収容室49は、吸い込み口48及び吐出口50につながっている。円板42及び複数の羽根43は、収容室49に設けられている。吸い込み口48は、雰囲気G1につながる。 【0034】 電動モータの回転力で回転部材13が回転されると、円板42は、図5B及び図6において、反時計回りに回転される。円板42には、通路78が設けられている。通路78は、例えば、中心線A1を中心として円板42の半径方向に沿って配置されている。通路78は、羽根43の数と同じ数が複数設けられている。通路78は、通路21につながっている。羽根43は、円板42の回転方向に沿って複数設けられている。羽根44は、通路45及び開口部46を有する。開口部46は、羽根43の表面に開口されており、開口部46は、通路45につながっている。通路45は、通路78につながっている。 【0035】 羽根43は、円板42の半径方向で外側に向かって延ばされている。羽根43は、円弧形状に湾曲されており、円板42の表面及び裏面のうち、回転方向で上流側に位置する表面51側に開口部46が設けられている。また、羽根43には、開口部46を覆うフィルタ47が設けられている。円板42が図6で反時計方向に回転されると、羽根 43の表面51側で対象物体B1は流動方向F5で流動する。羽根43には、仮想線D12と仮想線 D3との間に迎角θ2が設定されている。仮想線D12は、羽根43の厚さ方向の中心に位置する直線である。仮想線D3は、流動方向F5に沿った直線である。そして、迎角θ2は、例えば、 10度<θ2<75度 の範囲内に設定できる。 【0036】 電動モータの回転力で回転部材13が回転されると、円板42は、図5B及び図6において、反時計回りに回転され、対象物体B1が吸い込み口48を経由して収容室49へ吸い込まれる。対象物体B1は、羽根43の表面に押し付けられ、物体と流体とが フィルタ47により分離される。フィルタ47を透過した流体は、開口部46、通路45,78を 経由して通路21へ吸い込まれる。物体は、円板42及び羽根43の回転による遠心力で吐出口50へ吐出される。このようにして、対象物体B1は、物体と流体とに分離される。対象物体B1は、フィルタ47に対して流動方向F2で押し付けられる。 【0037】 また、羽根43の裏面52側における対象物体B1の流速は、羽根43の表面51側における対象物体B1の流速を超える。このため、裏面52側における対象物体B1の流れF6の圧力(陰圧・負圧)は、表面51側における対象物体B1の流れF5の圧力未満である。さらに、羽根43は、流れF5の圧力と、流れF6の圧力との差に応じた 揚力F7を受ける。揚力F7は、円板42の半径方向で内側に向かう力である。また、フィルタ47の表面付近では、対象物体B1の流れ(クロスフロー)E2が生じる。流れE2の向きは、流れF2の向きに対して交差している。このため、フィルタ47により分離された物体が、流れE2によってフィルタ47の表面から除去され易くなり、フィルタ47の目詰まりを抑制できる。したがって、フィルタ47が目詰まりすることを抑制するために、格別の要素を設けずに済み、フィルタ装置10の構造が複雑化することを抑制できる。 【0038】 さらに、羽根43の迎角θ2を調整する調整機構が設けられていてもよい。例えば、円板42に雌ねじ穴が設けられ、羽根43が円板42に対してねじ部材により固定されている。そして、ねじ部材を取り外して羽根43の迎角θ2を調整した状態で、羽根 43を円板42に対してねじ部材で固定できる位置に、雌ねじ穴が設けられていればよい。また、迎角θ2を調整する場合、通路78と通路45とが接続された箇所を中心として、羽根43が所定角度の範囲内で回転して停止される。 【0039】 (具体例3) 図7A及び図7Bは、図1に示すプロペラ14に代えて、タービン53を回転部材13に取り付ける例である。また、図8は、図7Bに示す中心線A1に対して垂直な平面内における部分的な拡大断面図である。タービン53は、対象物体B1の雰囲気G1に配置される。タービン53は、円板54、補助円板55、及び複数の羽根56を有する。複数の羽根56は、円板54の回転方向に間隔をおいて配置されている。羽根56は、円板54の回転方向に変位され、かつ、円板54の半径方向に変位されるように延ばされている。羽根56は、表面60及び裏面59を有する。表面60は、円板54の半径方向で裏面59より外側に配置されている。円板54は回転部材13に固定されている。 【0040】 図7Aは、中心線A1に対して垂直な平面内において、円板54の一部の形状及び構造を示している。円板54には中心線A1を中心として放射状に複数の通路58がけられている。通路58の数は、羽根56の数と同じである。例えば、羽根56の数が8個であり、通路58の数は8本である。図8のように、通路58の中心を表す仮想線D 5は、円板54に対して半径方向に設けられている。通路58は、通路21に接続されている。仮想線D5は、羽根56の表面60と交差している。対象物体B1は、フィルタ61に対して流動方向F8で押し付けられる。また、図8において、タービン53は、時計回りに回転される。羽根56の表面60側において対象物体B1は、羽根56に対して流動方向F8で流動する。流動方向F8に沿った仮想線D6と、羽根56の厚さ方向の中心を通る仮想線D8との間に、所定角度としての迎角θ3が設定されている。迎角θ3は、例えば、 10度<θ3<75度 の範囲内に設定できる。 【0041】 羽根56は、通路57を有し、通路57は通路58に接続されている。羽根56の表面60に開口する開口部74が設けられ、開口部74は、通路57につながっている。表面60にフィルタ61が固定され、フィルタ61は、開口部74を覆っている。フィルタ61の材質としては、フィルタ61と同様のものを選択できる。電動モータの回転 力で回転部材13が回転されると、タービン53は、図7Bにおいて、時計回りに回転され、対象物体B1が撹拌される。対象物体B1は、羽根56の表面60に押し付けられ、物体と流体とがフィルタ61により分離される。フィルタ61を透過した流体は、通路57,58を経由して通路21へ吸い込まれる。対象物体B1は、フィルタ61に対して流動方向F8で押し付けられる。また、羽根56の裏面59側における対象物体B1の流速は、羽根56の表面60側における対象物体B1の流速を超える。 【0042】 このため、裏面59側における対象物体B1の流れF9の圧力(陰圧・負圧)は、表面60側における対象物体B1の流れF8の圧力未満である。さらに、羽根56は、流れF8の圧力と、流れF9の圧力との差に応じた揚力F10を受ける。揚力F10は、円板54の半径方向で内側に向かう力である。また、フィルタ61の表面60付近では、対象物体B1の流れ(クロスフロー)E3が生じる。流れE3の向きは、流れF8の向きに対して交差している。このため、フィルタ61により分離された物体が、流れE3によってフィルタ61の表面から除去され易くなる。したがって、フィルタ61が目詰まりすることを抑制するために、格別の要素を設けずに済み、フィルタ装置10の構造が複雑化することを抑制できる。 【0043】 (具体例4) 図9は、図7B及び図8に示すタービン53の羽根56の向きを変えたものである。図9は、図7Bに示す中心線A1に対して垂直な平面内における部分的な拡大断面図である。タービン53の半径方向において、羽根56の裏面59に通路57が開口され、フィルタ61が裏面59に取り付けられている。仮想線D5は、羽根56の裏面59と交差している。また、図9において、タービン53は、時計回りに回転される。羽根56の裏面59側において対象物体B1は、羽根56に対して流動方向F13で流動する。流動方向F13に沿った仮想線D9と、羽根56の厚さ方向の中心を通る仮想線D 10との間に、所定角度としての迎角θ4が設定されている。迎角θ4は、例えば、 10度<θ4<75度 の範囲内に設定できる。 【0044】 電動モータの回転力で回転部材13が回転されると、タービン53は、図8において、時計回りに回転され、対象物体B1が撹拌される。対象物体B1は、羽根56の裏面 59に押し付けられ、物体と流体とがフィルタ61により分離される。フィルタ61を透過した流体は、通路57,58を経由して通路21へ吸い込まれる。対象物体B1は、フィルタ61に対して流動方向F13で押し付けられる。また、羽根56の表面60側における対象物体B1の流速は、羽根56の裏面59側における対象物体B1の流速を超える。 【0045】 このため、表面60側における対象物体B1の流れF11の圧力(陰圧・負圧)は、裏面59側における対象物体B1の流れF13の圧力未満である。さらに、羽根56は、流れF11の圧力と、流れF13の圧力との差に応じた揚力F14を受ける。揚力 F14は、円板54の半径方向で外側に向かう力である。また、フィルタ61の表面付近では、対象物体B1の流れ(クロスフロー)E4が生じる。流れE4の向きは、流れF13の向きに対して交差している。このため、フィルタ61により分離された物体が、流れE4によってフィルタ61の表面から除去され易くなる。したがって、フィルタ61が目詰まりすることを抑制するために、格別の要素を設けずに済み、フィルタ装置10の構造が複雑化することを抑制できる。 【0046】 (応用例) 図8及び図9に示す例において、羽根56が円板54及び補助円板55に対して、迎角θ3,θ4を変更できる調整機構を有していてもよい。例えば、羽根56に通路57,58につながる通路を有する支持軸を設け、円板54及び補助円板55に、支持軸を回転可能に支持する支持穴を設ける。そして、羽根56に係合突起を設け、円板54に複数の係合穴を設ける。羽根56の支持軸を中心として作動させ、係合突起を係合させる係合穴の位置を変更することにより、円板54に対して羽根56を作動及び停止させることができる。 【0047】 (具体例5) 図10及び図11は、フィルタ装置10をスクリュー62に適用する例である。図10は、中心線A1に沿った方向の平面内における断面図、図11は、図10の一部を示す拡大断面図である。スクリュー62は、回転部材13と、回転部材13の外周面に設けられた羽根64と、を有する。回転部材13は、中心線A1を中心として配置される円筒である。回転部材13は、電動モータの回転力により、中心線A1を中心として第1回転方向C1で回転される。中心線A1は、例えば、略水平に配置される。羽根64は、回転部材13の外周面に螺旋状に、かつ、中心線A1に沿った方向で所定範囲に亘って設けられている。羽根64は、回転部材13の外周面から、回転部材13の半径方向で外側に向けて突出されている。 【0048】 スクリュー62は、輸送管67の輸送路68に配置されている。輸送管67は、中心線A1を中心として配置された円筒部材であり、輸送管67は、スクリュー62の外側に配置されている。対象物体は、輸送路68の入口72へ供給される。スクリュー62が第1回転方向C1で回転されると、羽根64が対象物体に押し付けられて、対象物体 が輸送管67内で第3方向C4の向きで輸送される。羽根64は、第1表面65及び第2表面66を有する。第2表面66が、対象物体に対し第3方向C4の向きで押し付けられ、対象物体が輸送管67内で第3方向C4の向きで輸送され、輸送路68の出口73から排出される。 【0049】 図11において、回転部材13が第1回転方向C1で回転され、羽根64の第1表面65側において対象物体B1は、羽根64に対して流動方向F12で流動する。流動方向F12に沿った仮想線D7と、羽根64の厚さ方向の中心を通る仮想線D11との間に、所定角度としての迎角θ5が設定されている。迎角θ5は、例えば、 10度<θ5<90度 の範囲内に設定できる。 【0050】 また、羽根22は、通路69を有する。通路69は、通路21につながっている。第1表面65に開口部70が設けられ、開口部70は、通路69につながっている。開口部70は、回転部材13の回転方向に所定の間隔で複数配置され、かつ、中心線A1に沿った方向で所定の範囲内に亘って配置されている。フィルタ71が第1表面65に 設けられている。フィルタ71は、開口部70を覆っている。フィルタ71は、対象物体に含まれる物体と流体とを分離し、かつ、物体から物体を除去した流体を通過させる機能を有する。フィルタ71の材質及び形状は、フィルタ31の材質及び形状と同様にできる。 【0051】 電動モータの回転力で回転部材13が第1回転方向C1で回転されると、対象物体は、スクリュー62の羽根64により、輸送管67の輸送路68を第3方向C4に沿って輸送される。回転部材13が第1回転方向C1で回転すると、羽根64に迎角θ5が設定されているため、羽根64は、第1表面65側において、対象物体から流れF12 の圧力(陽圧)を受ける。流れF12の圧力は、第1回転方向C1と略平行である。また、羽根64の第2表面66側における対象物体の流速は、第1表面65側における対象物体の流速を超える。このため、第2表面66側における対象物体の流れF13の圧力(陰圧・負圧)は、流れF12の圧力未満である。さらに、羽根64は、流れF12の圧力と、流れF13の圧力との差に応じた揚力F14を受ける。揚力F14は、中心線A1に沿った方向である。 【0052】 対象物体が流れF12の圧力でフィルタ71に押し付けられると、フィルタ71は、対象物体に含まれる物体と流体とを分離する。このため、対象物体に含まれる流体のみが、フィルタ71を透過して通路69を経由して通路21へ吸い込まれる。そして、渦巻ポンプ12の羽根車17の回転により吸引力が発生しているため、通路29へ進入した流体は、通路28及び通路21を経由して吸い込み口18へ吸い込まれる。 【0053】 一方、輸送路68におけるフィルタ71の表面付近では、対象物体の流れ(クロスフロー)E5が生じる。流れE5の向きは、流れF12の向きに対して交差している。このため、フィルタ71により分離された物体が、流れE5によってフィルタ71の表 面から除去され易くなる。このため、フィルタ71に物体が堆積しにくくなり、フィルタ71の目詰まりを抑制できる。したがって、フィルタ71が目詰まりすることを抑制するために、格別の要素を設けずに済み、フィルタ装置10の構造が複雑化することを抑制できる。なお、図10及び図11に示すフィルタ装置10は、中心線A1が鉛直方向に沿って配置されていてもよいし、中心線A1が水平方向及び鉛直方向に対して傾斜して配置されていてもよい。 【0054】 (変更例) 整流部材は、雰囲気内に設けられていてもよいし、設けられていなくてもよい。プロペラの回転部材の同一円周上に設ける1列の羽根の数は、任意に設定できる。また、プロペラの回転中心を示す仮想線に沿った方向において、異なる位置に配置する羽根の列の数は、任意に設定できる。つまり、1列でもよいし、複数列、言い換 えると、多重列、多段列であってもよい。さらに、羽根の形状は、任意に設定可能である。また、プロペラの回転中心を示す仮想線に対して垂直な平面内において、羽根の1枚毎に設けるフィルタの形状は、任意に設定可能である。さらに、羽根の1枚毎に設けるフィルタの位置及び数は、任意に設定可能である。フィルタの数を変更することにより、濾過面積 (分離面積)を変更できる。さらにまた、フィルタを羽根に取り付ける方法は、接着剤による接着、溶接、ねじ固定、嵌め込み、カシメ等のうちの何れであってもよい。さらに、フィルタは、羽根から取り外しできないように固定されていてもよいし、フィルタが、羽根に対して取り付け及び取り外しできるように構成されていてもよい。 【0055】 さらに、プロペラの回転中心を示す仮想線は、略水平方向に沿って配置される他、鉛直方向に沿って配置されてもよいし、水平方向及び鉛直方向に対して傾斜するように配置されていてもよい。鉛直方向は、重力の作用方向を意味する。そして、プロペラの回転中心を示す仮想線を鉛直方向に沿って配置し、かつ、プロペラが第1回転方向に回転されることによって、鉛直方向で上から下に向けて流体の流れが生じる構成としてもよい。 【0056】 さらに、回転部材の仮想線に沿った方向に複数のプロペラを設ける場合、各プロペラの 直径(外径)は同一でもよいし異なっていてもよい。例えば、仮想線を略鉛直方向に沿って配置し、かつ、鉛直方向で相対的に低位置であることに伴い、各プロペラの 直径(外径)が相対的に拡大する構成を採用できる。さらに、仮想線を略水平方向に沿って配置し、羽根を第1方向に傾斜させた第1プロペラ群と、羽根を第1方向とは逆の第2方向に傾斜させた第2プロペラ群と、を仮想線に沿った方向に並べて配置することができる。この場合、第1プロペラ群に含まれる各プロペラの直径(外径)は、第2プロペラ群に近づくことに伴い相対的に拡大する構成とする。また、第2プロペラ群に含まれる各プロペラの直径(外径)は、第1プロペラ群に近づくことに伴い相対的に拡大する構成とする。 【0057】 本実施形態で説明した事項の技術的意味の一例は、次の通りである。フィ ルタ装置10は、フィルタ装置の一例である。回転部材13は、回転部材の一例である。羽根22,43,56,64は、羽根の一例である。表面23,51,60、及び第1表面65は、羽根の表面の一例である。通路29,45,57,69は、第1通路の一例で ある。開口部30,46,70,74は、開口部の一例である。フィルタ31,47,61,71は、フィルタの一例である。通路21は、第2通路の一例である。渦巻ポンプ12は、ポンプの一例である。迎角θ1,θ2,θ3,θ5は、迎角の一例である。仮想線D1,D8,D10,D11,D12は、第1仮想線の一例である。仮想線D2,D3,D6,D7,D9は、第2仮想線の一例である。中心線A1は、中心線の一例である。スクリュー62は、スクリューの一例である。電動モータ11は、電動モータの一例である。整流部材32は、容器の一例である。供給管33は、供給管の一例である。吐出管34は、吐出管の一例である。上側開口部76は、上側開口部の一例である。下側開口部75は、下側開口部の一例である。 【0058】 本実施形態は、図面を用いて開示されたものに限定されるものではなく、その要旨を逸脱しない範囲で種々変更可能である。例えば、迎角は、揚力“2”乃至揚力“10”の範囲を得られ、かつ、電動モータの過負荷を抑制できる範囲に設定される。電動モータの過負荷は、失速、つまり、ストールすることを含む。さらに、フィルタの材質及び羽根 の材質、羽根の回転速度は、対象物体の種類、成分、粘度、温度等に応じて設定される。また、本開示のフィルタ装置は、ポンプが設けられていてもよいし、ポンプが設けられていなくてもよい。吸い込み口及び吐出口は、それぞれ通路として把握することも可能である。 【産業上の利用可能性】 【0059】 本開示のフィルタ装置は、濾過システム、浄化システム、蒸留システム、 分離システム 、濃縮システム、抽出システム、脱水システム、海水の淡水化システム、等 に利用可能である。 【符号の説明】 【0060】 10・・・フィルタ装置、11・・・電動モータ、12・・・渦巻ポンプ、13・・・回転部材、21・・・通路、22,43,56,64・・・羽根、23,51,60,65・・・表面、29,45,57,69・・・通路、30,46,70,74・・・開口部、31,47,61,71・・・フィルタ、32・・・整流部材、33・・・供給管、34・・・吐出管、62・・・スクリュー、80・・・外側容器、81・・・内側容器、A1・・・中心線、D2,D3,D6,D7・・・仮想線、θ1,θ2,θ3,θ 5・・・迎角 |
| 【図1】 |
【図2A】 |
【図2B】 |
【図3A】 |
【図3B】 |
【図4】 |
【図5A】 |
【図5B】 |
【図6】 |
【図7A】 |
【図7B】 |
【図8】 |
【図9】 |
【図10】 |
【図11】 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
| ページtop へ |